

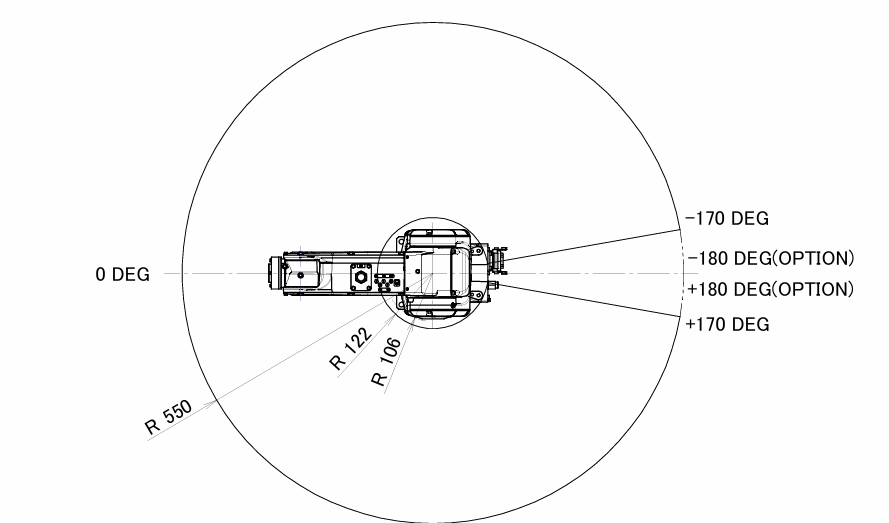
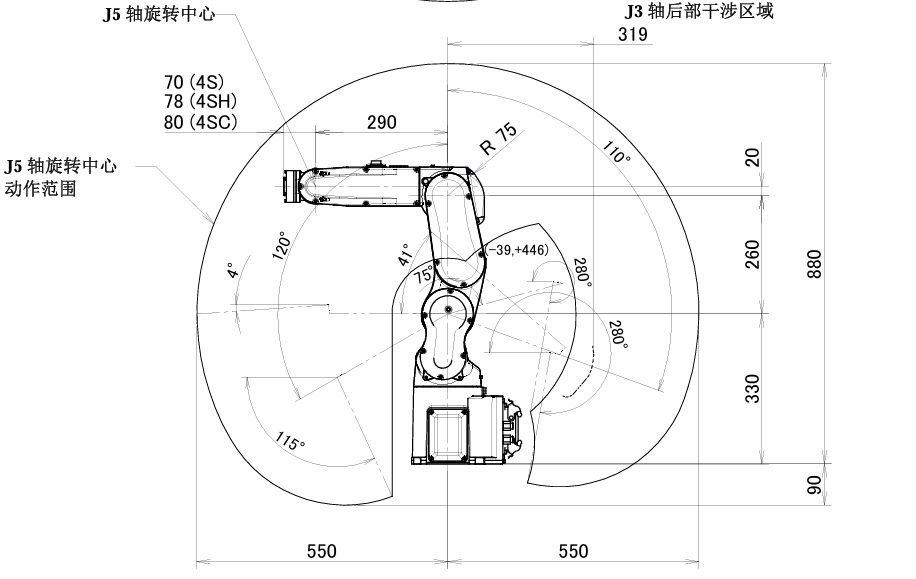
机器人的动作范围图。在安装外围设备时,应注意避免干涉机器人主体部分和动作范围
原点位置和可动范围
各控制轴上,分别设有原点和可动范围。控制轴到达可动范围的极限,叫做超程(OT)。各轴都在可动范围的两端进行超程检测。只要不是由于伺服系统的异常和系统出错而导致原点位置丢失,机器人的动作都不会超出可动范围。此外,为了进一步确保安全,还提供采用机械式制动器的可动范围限制。
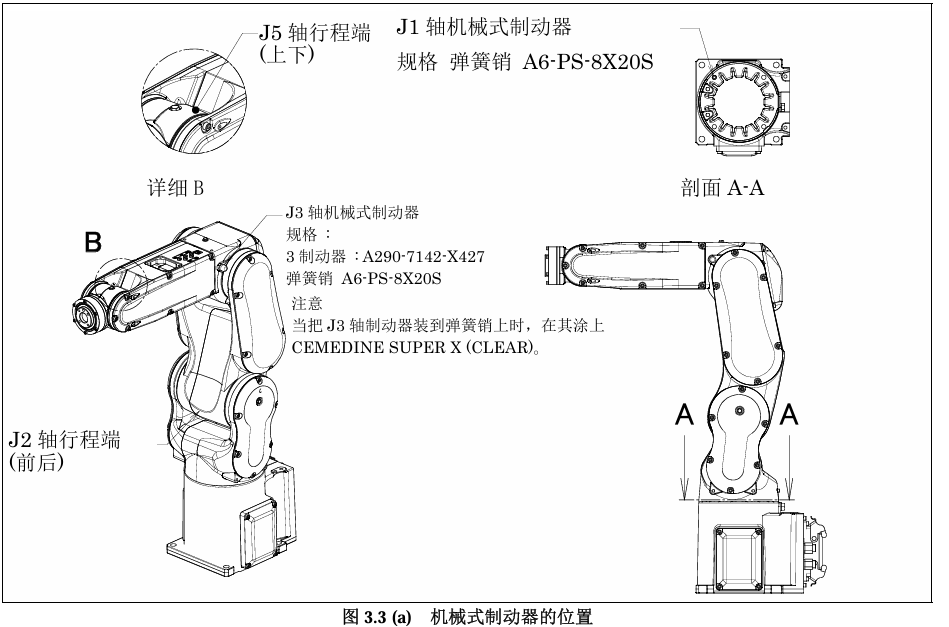
J1、J3轴采用只要机械式制动器变形机器人就停止的结构。
机械式制动器变形时,需要予以更换。有关J3轴机械式制动器,请参阅图3.4(a)。
有关J1轴机械式制动器的更换方法,请向我公司洽询。
更多资讯:发那科机器人
