

所谓高惯量模式根据负载惯量的大小,提供有2个伺服运动参数。通过设定与负载惯量的大小相匹配的参数,即可实现最佳的加/减速动作。
参数的切换,按照如下的方法进行。
一边按下"PREV”和“NEXT”键,接通电源。接着选择“3.Controlled start”按下示教器的"MENU”键,然后选择"9.MAINTENANCE"。
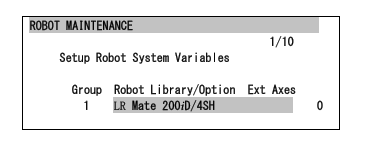
显示如下画面。
将光标指向 LR Mate 200iD/4SH,按下F4键的"MANUAL"。
在 INERTIA MODE SETTING (惯量模式选择),选择 Standard Inertia mode (标准量模式)或者 High Inertia Mode 高惯量模式。
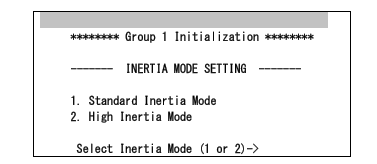
按下示教器的FCTN 键,选择“1.START(COLD)"另外,在出货时已经设定为标准惯量模式。
更多资讯:fanuc机器人
