

发那科机器人运转之前,务必进行负载设定。请勿在过载状态下进行运转。包括与周边设备连接用电缆等在内的负载质量不可超过机器人的可搬运质量。否则将有可能导致减速机的寿命缩短。
更换部件后实行负载推算(选项功能)时更换手腕轴(J5轴或者.J6轴)的电机或者减速机等的时候,推算精度有可能下降。实行负载推算之前,请实行负载推算的校准。关于负载推算功能,请参照一下。R-30iB/R-30iB Mate 控制装置选项功能操作说明书(B-83284CM-2)的「9章负载推算功能」
动作性能画面,具有一览画面、负载设定画面以及设备设定画面。在本画面设定负载信息以及安装在机器人上的设备信息
按下 MENU(菜单)键,显示菜单画面。
选择下页“6系统”。
按下F1 类型,显示画面切换菜单。
选择“动作”。出现一览画面。
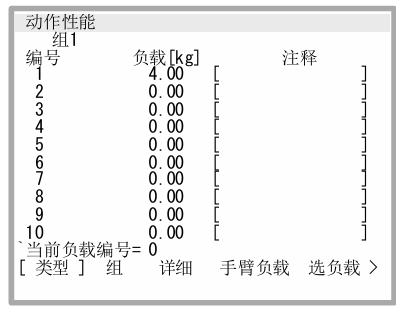
可以设定条件编号1~10共10类负载信息。将光标移动到任一编号的行,按下F3(详细),即进入负载设定画面。
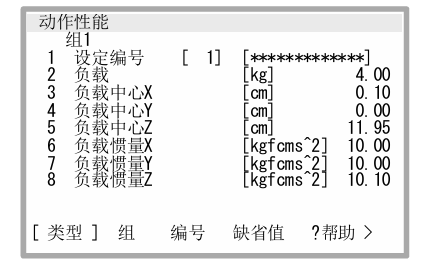
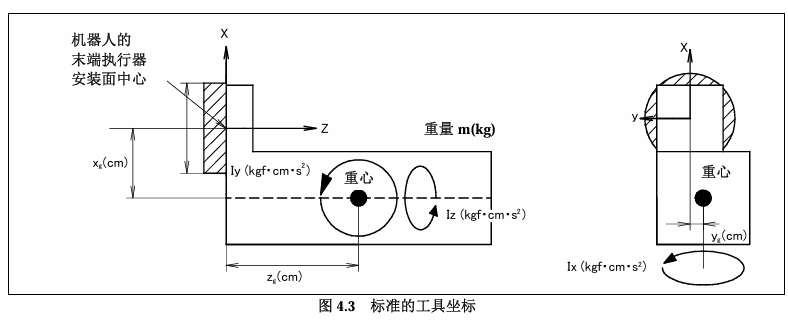
分别设定负载的重量、重心位置、重心周围的惯量。负载设定画面上所显示的X、Y、Z方向,相当于标准的(尚未设定工具坐标系状态的)工具坐标。输入设定值时,显示出“路径和周期时间将会改变。设置吗?”这样的确认信息,按下 F4(是)或F5(否)。按下 F3(编号),即可移动到其他的条件编号的负载设定画面。此外,若采用多组系统,按下F2(组)即可移动到其他组的设定画面。
按下PREV(返回)键,返回到一览画面。按下F5(选负载),输入要使用的负载设定条件编号。
在一览画面上,按下F4(手臂设备),进入设备设定画面。
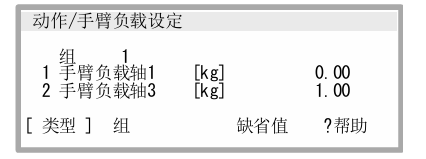
分别设定J2机座部以及J3手臂部的负载重量。手臂负载轴1lkgl:J2机座部负载重量手臂负载轴3lkg):J3手臂部负载重量输入上述值后,
显示“路径和周期时间将会改变。设置吗?”这样的确认信息,输入F4(是)或F5(否)。
设定了设备重量,并断电重启后,这些设定才会生效。
更多资讯:发那科机器人
